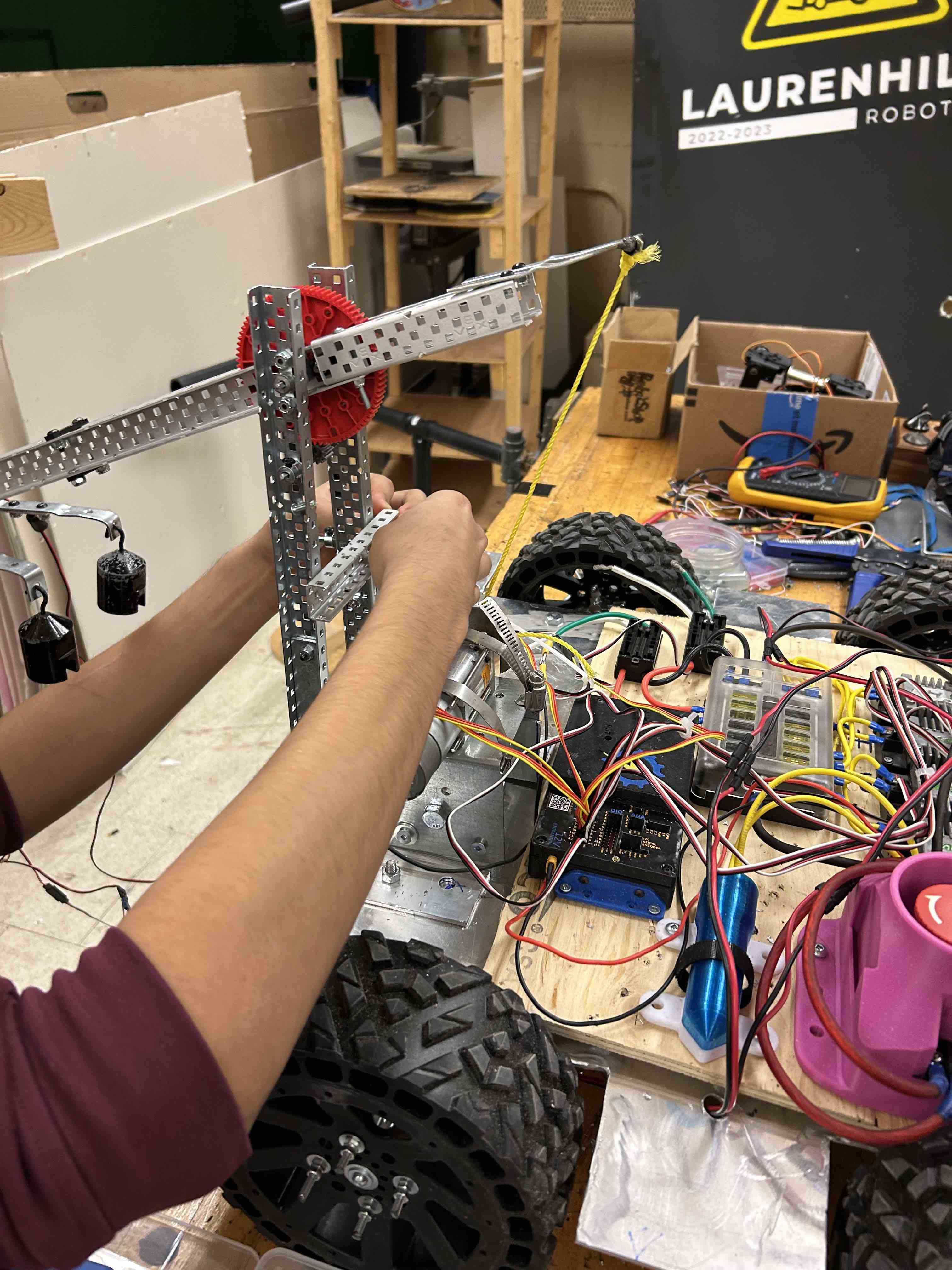
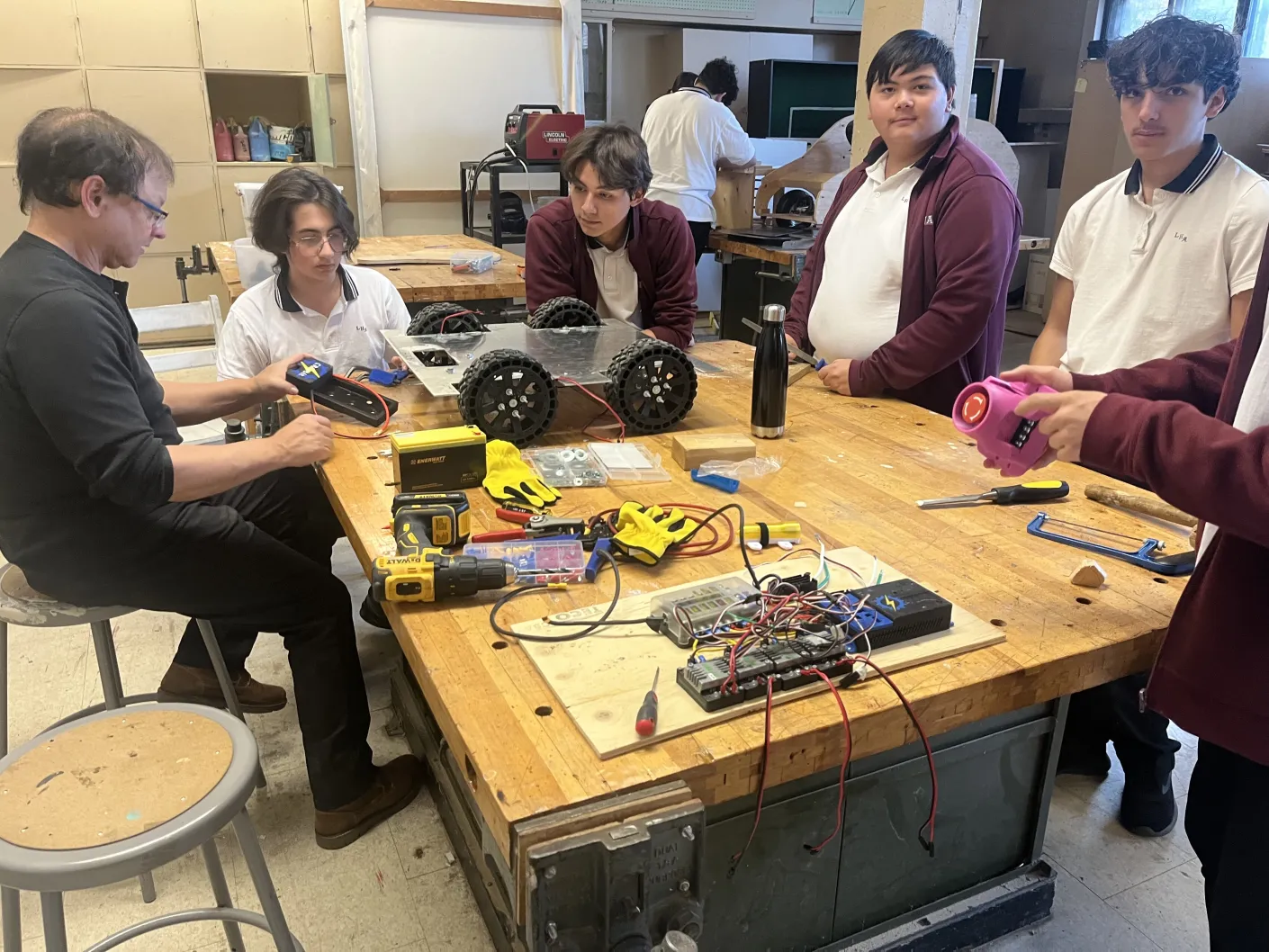
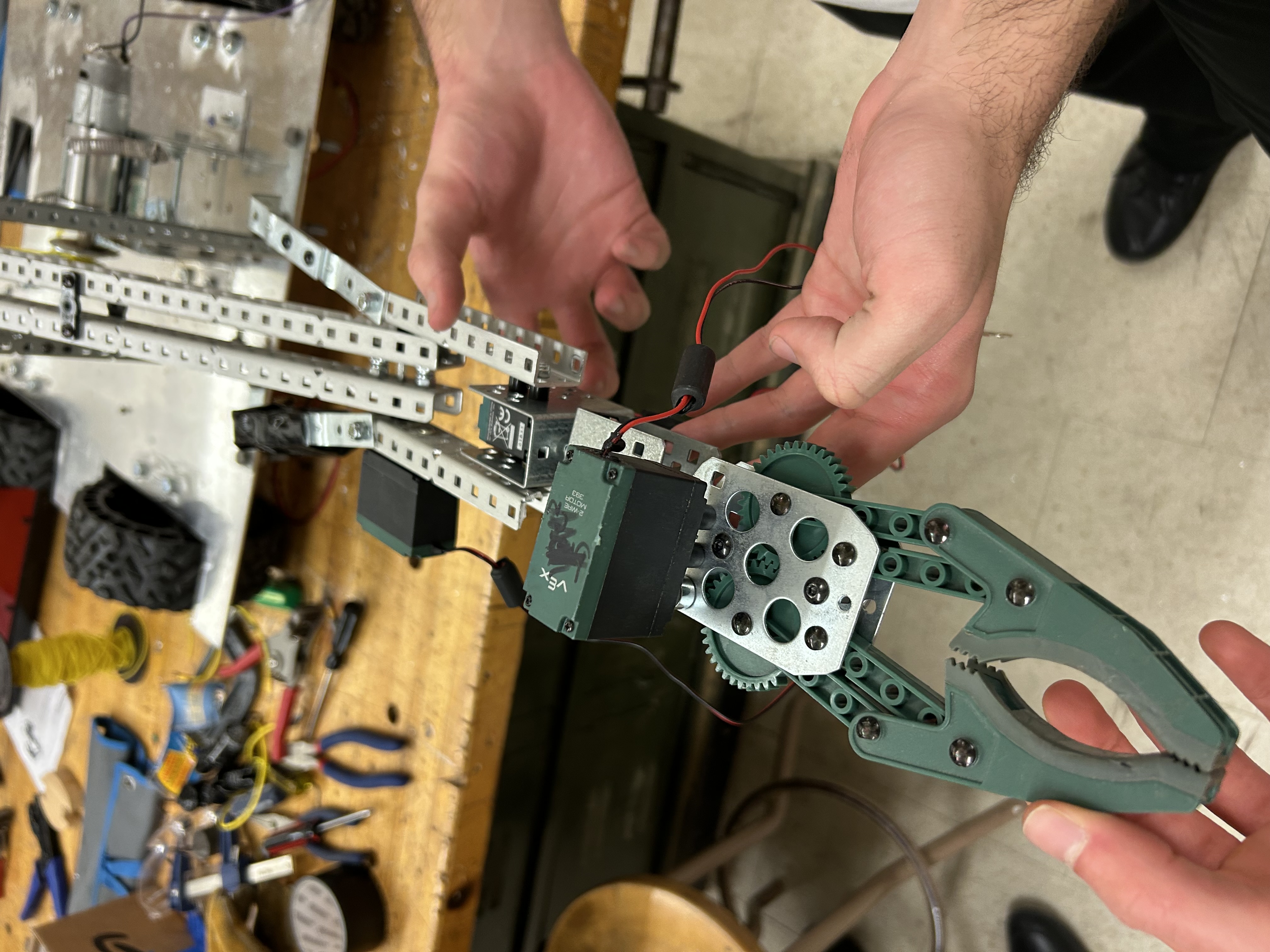
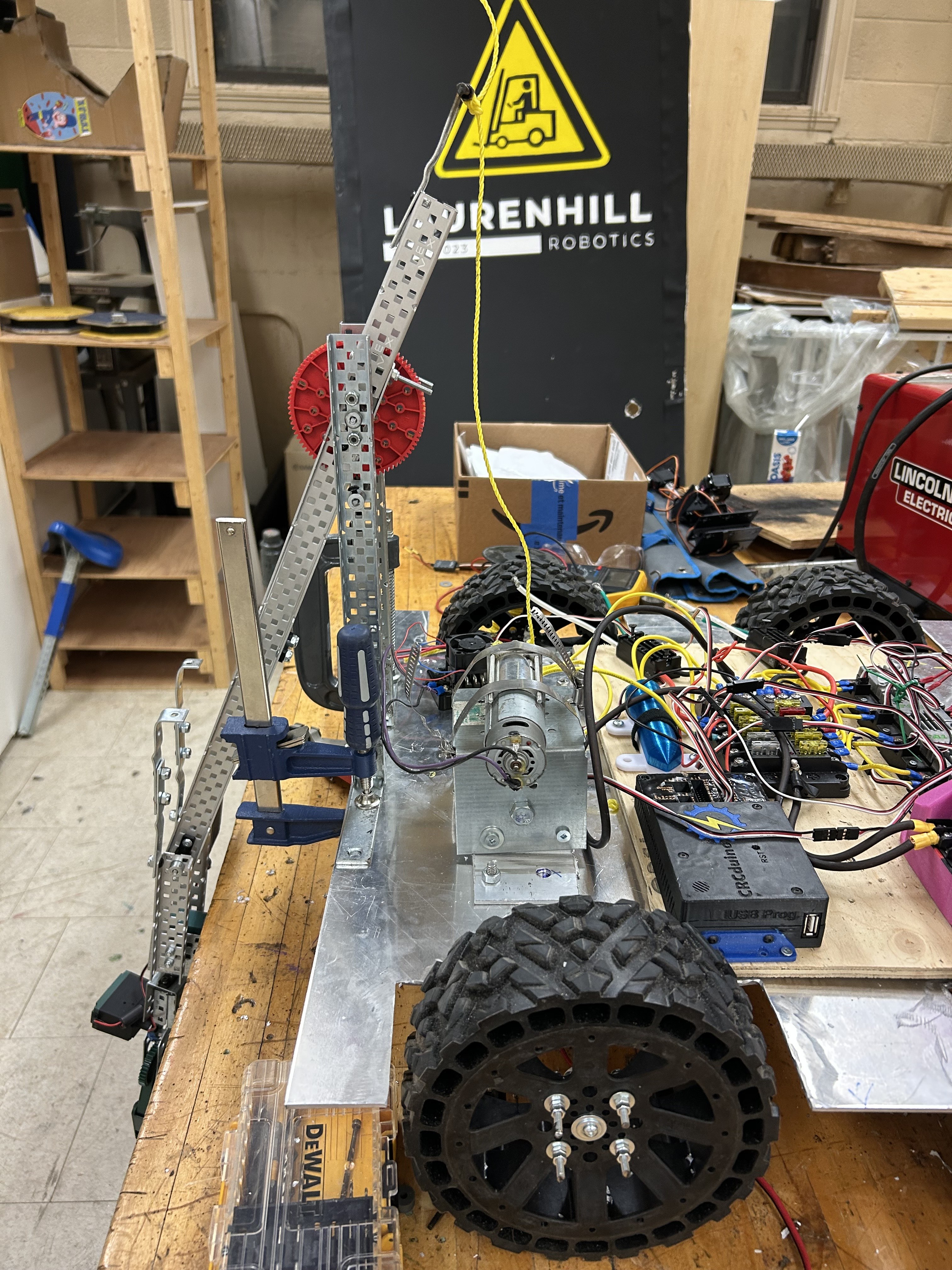
The brawn of the team, despite being the "villains" of the video, they work hard not only on the robot but also on fun side projects for the school. They created one major thing, the arm for Tak Tik 2025.
Roster
Journal
Pre-Kickoff
November




December

Before Winter Break
Over Winter Break

January